

MARS WALKER
Assistive products that enable walking for future Mars travelers.
Product Design
Interactive Hardware Development
6 min read
Time
Jul.2024 - Sep. 2024
My work
Research, Design, Hardware Development, Prototyping
Team
Collaborative Project
Yiling Yang, Jinsu yani
Context
Space Democracy
With advancements in aerospace engineering and the democratized access to space through aerospace tech companies such as SpaceX and Blue Origin, space exploration is becoming more plausible and accessible.
Present: Suborbital & Orbital Travel
U.S. Space Tourism Market
source: https://www.grandviewresearch.com/
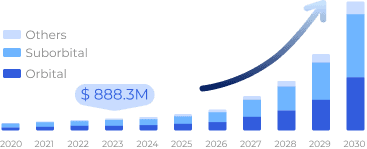
U.S. Market CAGR
2024-2030
Promising Market Potential
44.8%
Destination: Mars
Potential for Habitability
Water - There’s a lot.
Mostly trapped in ice. Mars has enough water to cover the planet to a depth of 35m.
Air - We can make it.
The martian atmosphere can be converted into breathable oxygen.
Food - We can grow it.
The soil on Mars contains nutrients many plants need to survive.
Time-We can adapt to.
A Similar Day-Night Cycle
Future - Shortened Journey Time
with future technological improvements
More Efficient Propulsion Systems
Advanced Trajectory Mechanics
We BelieveTime Will Be Minimized To
6
Current
months
3
Future
months
Challenge
How to help travelers walk easily
when landing on Mars ?
Tricky Transitions in gravity fields
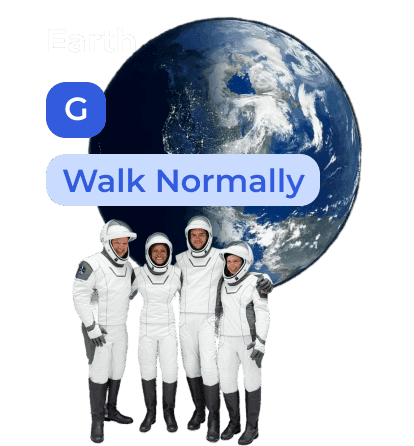
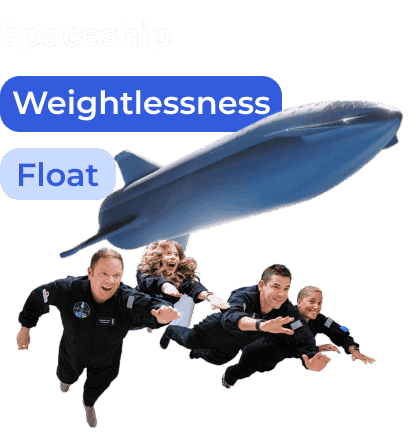
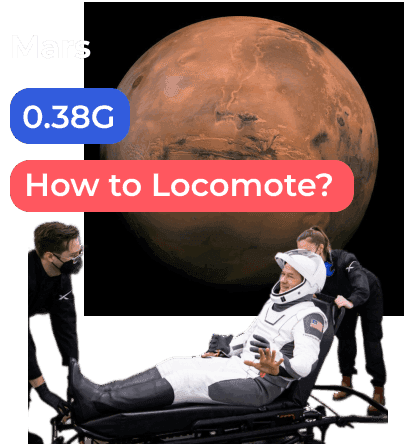
Transitioning from one gravity field to another is trickier than it sounds. Particularly, people seem unable to move around as they normally would, which is a crucial issue that individuals will face when landing on Mars. Similarly, the return of astronauts to Earth from space mirrors this challenge, as they too must adapt to a new gravity field, during which they are unable to walk.

Solution
Inspired by SR-AFO research (Thalman et al.), we conceptualized a wearable exoskeleton with pneumatic actuators to assist walking in Mars’ low-gravity environment. The design provides joint support to counter muscle atrophy and bone loss, while pneumatic actuators in the lower leg enhance propulsion by generating contractile force. A 3D-printed prototype was created to visualize the exoskeleton’s functionality and validate its ergonomic fit. Additionally, we designed a conceptual Galvanic Vestibular Stimulation (GVS) equipment to help users maintain balance by simulating vestibular signals.


Research
Current Solutions
The priority is to tackle musculoskeletal and vestibular challenges, as they have a more significant impact, while cardiovascular concerns are less persistent and more difficult to address.
Rigorous training

Medicine
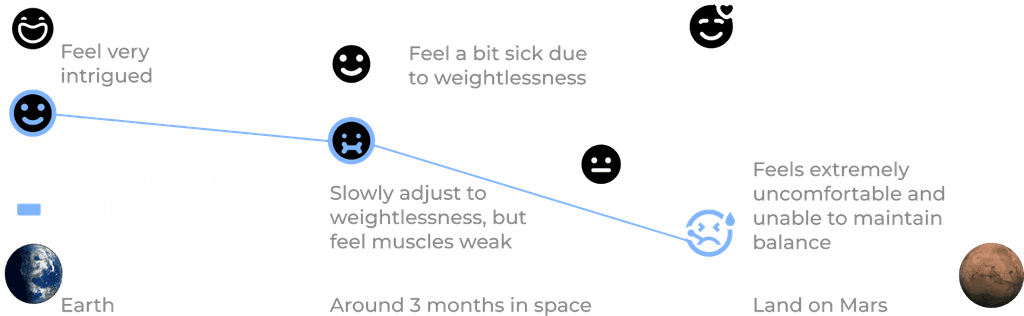
Locomotion Struggles from Zero to Mars Gravity
Musculoskeletal Deconditioning


Neurovestibular System

Cardiovascular Adaptations to Gravity

Persona
NAME: Alex
AGE: 27 years old
EXPERIENCE: First Time of Space Travel
Occupation: Marketing Manager
I don't want to spend so long training like an astronaut.
I want to quickly adapt to Mars gravity, walking on the planet and feeling it for real.
Alex has saved for years to afford a once-in-a-lifetime vacation to Mar and she literally hopes to feel the exterior planet for real. However, Alex is not interested in rigorous physical training or mastering complex equipment. What she seeks is a device that seamlessly adapts to her body and offers gentle, effective support, making walking feel as natural as it does on Earth.
Bone Health
Physical Strength
Susceptible to Motion Sickness
Goals
Instant Adaptation
Effortless Exploration
Physical Comfort & Confidence
Intuitive, Low-Barrier Operation
Enjoyable Tourist Experience

How might we help people walk naturally on Mars as soon as they arrive, without the need of long, difficult training?
Design
brainstorm
Needs
Bone Support
Provide structural support and facilitate movement
Muscle Strength
The calf muscles are essential for lower limb activities such as walking and jumping.
Dorsiflexion and planter flexion
This constitutes the propulsive phase in the locomotion process, facilitating forward progression.
Keep body balance and prevent to fall
Provides enhanced jumping strength
As research has shown, skipping may be the preferred locomotion strategy on Mars[5].
vestibular signal
Integrate additional sensory information for spatial orientation and further aid in maintaining balance.
Offerings
Exoskeleton
Assistive Devices
Postural correction
Footwear Modifications
Hard Elements
soft Pneumatic actuators
Soft Robotics
Muscle simulation
Align with natural walking to give extra support
Galvanic Vestibular Stimulation Equipment
Compensation
Brain-Computer Interaction
Generate electrical vestibular sensation
[5]: Ackermann M, van den Bogert AJ. Predictive simulation of gait at low gravity reveals skipping as the preferred locomotion strategy. J Biomech. 2012;45(7):1293-1298. doi:10.1016/j.jbiomech.2012.01.029
Wearable devices for
Lower Limbs Assistance and Vestibular System Adaptation
Research on Soft Pneumatic Actuators for Assistance
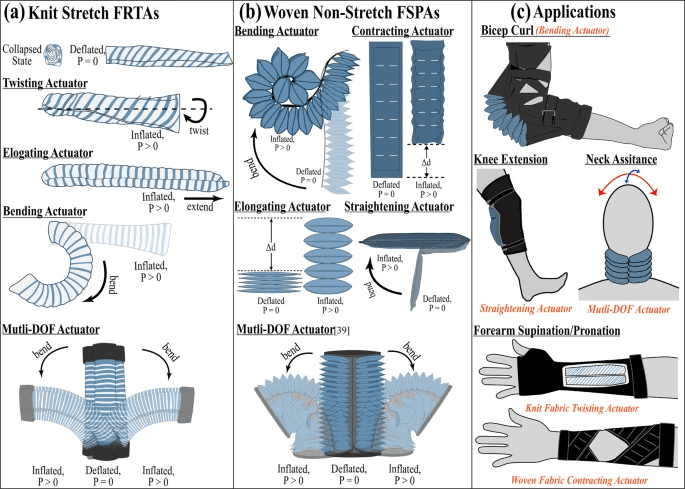
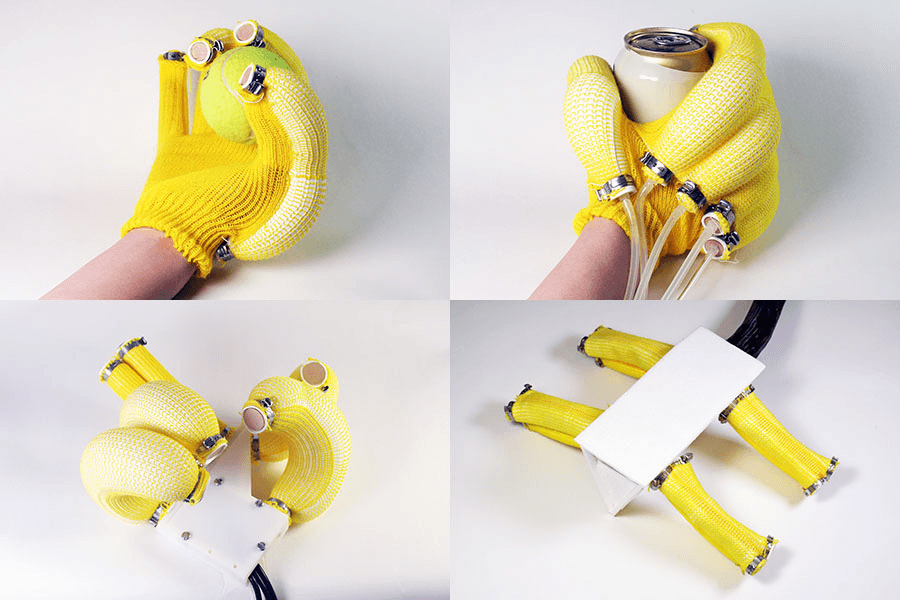
Following a review of the literature on various pneumatic actuators, I gained a basic understanding of their principles and applications. Below are some examples I explored[6][7][8][9].
[6]
[7]
[8]
[9]
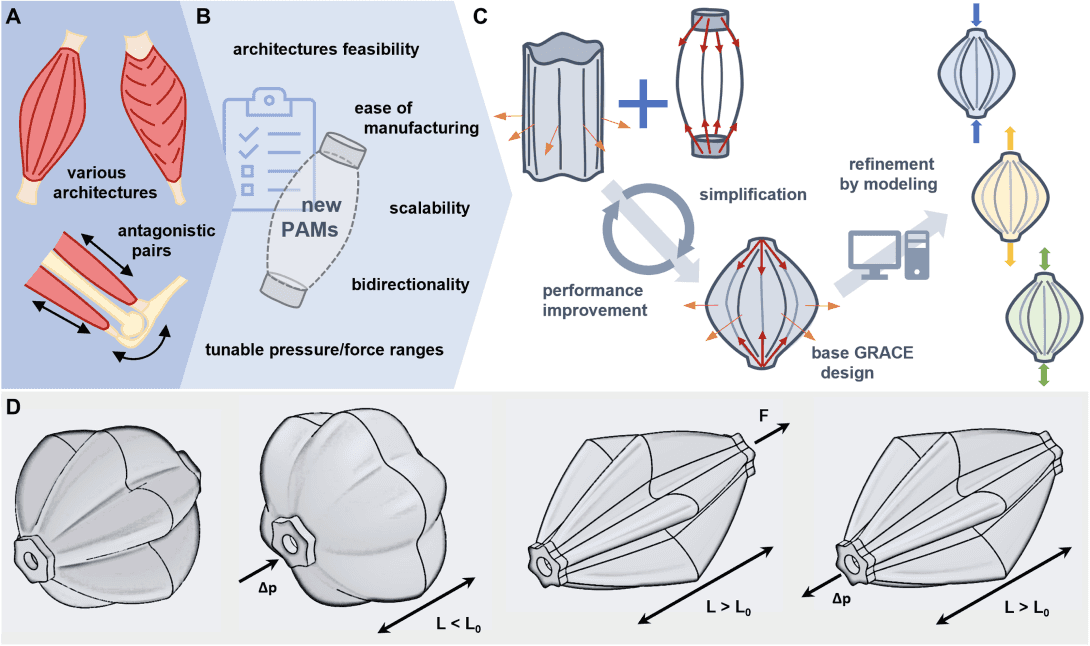
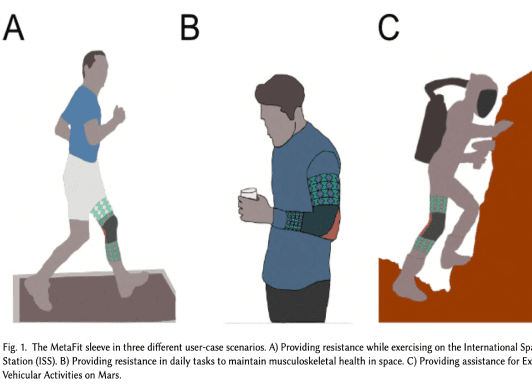
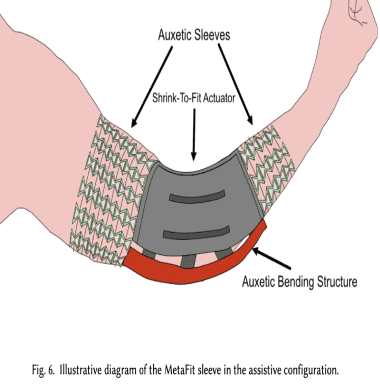
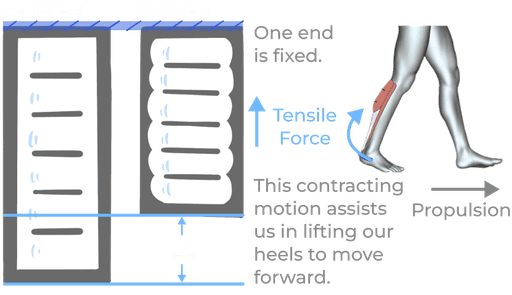
Pneumatic artificial muscles (PAMs) operate through inflation and deflation. When inflated, the flexible inner bladder expands radially and is constrained by the outer braided mesh, causing axial contraction and generating tensile force; when deflated, elasticity or external forces restore the muscle to its original length.
[6]: Pulvirenti, Emanuele, et al. “MetaFit: Towards Soft, Safe and Effective Body Interfacing for Health in Space.” SpaceCHI 3.0 Conference Proceedings, ACM, June 2023, Cambridge, MA. Accessed from https://www.researchgate.net/publication/378070908.
[7]: Huy Nguyen, Pham & Zhang, Wenlong. (2020). Design and Computational Modeling of Fabric Soft Pneumatic Actuators for Wearable Assistive Devices. Scientific Reports. 10. 10.1038/s41598-020-65003-2.
[8]: Yiyue Luo, Kui Wu, Andrew Spielberg, Michael Foshey, Daniela Rus, Tomás Palacios, and Wojciech Matusik. 2022. Digital Fabrication of Pneumatic Actuators with Integrated Sensing by Machine Knitting. In Proceedings of the 2022 CHI Conference on Human Factors in Computing Systems (CHI '22). Association for Computing Machinery, New York, NY, USA, Article 175, 1–13. https://doi.org/10.1145/3491102.3517577
[9]: Corrado De Pascali et al., 3D-printed biomimetic artificial muscles using soft actuators that contract and elongate.Sci. Robot.7,eabn4155(2022).DOI:10.1126/scirobotics.abn4155
Design Concept
1.Exoskeleton with Soft Pneumatic Actuators
Inspired by the SR-AFO[10], we developed footwear equipped with a rigid exoskeleton and soft pneumatic actuators, specifically for daily movement on Mars.
Exoskeleton
Around the knee and ankle joints.
Universal fit, easy to wear and adjust.
Offers robust support against muscle atrophy and bone loss.

Soft Pneumatic Actuatorsn
Based on prior research, we opted for a pneumatic actuator in the calf where muscle atrophy is most severe to assist with walking.
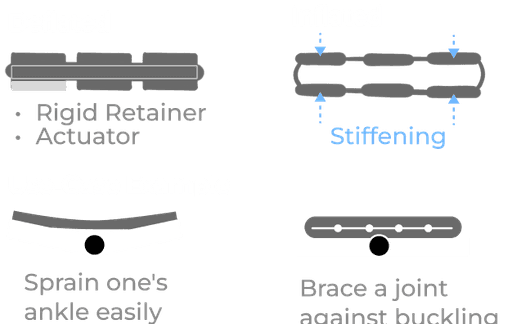
Considering the human body's preference for ankle-based balance, we designed a stability-enhancing device at the ankle.
So, our design is informed by the ff-PAM for generating contractile force and the MAVS for adjustable lateral stiffness, as referenced in the literature.
[10]: Thalman CM, Hertzell T, Debeurre M, Lee H. Multi-degrees-of-freedom soft robotic ankle-foot orthosis for gait assistance and variable ankle support. Wearable Technol. 2022;3:e18. doi:10.1017/wtc.2022.14

How it works?
Plantarflexion
Ankle stability for balance during walking
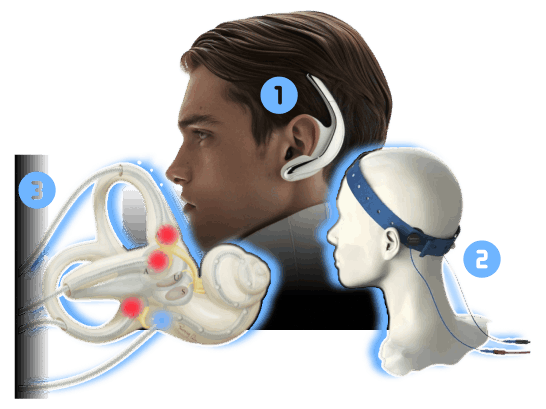
2.Galvanic Vestibular Stimulation Equipment
Technique
Non-invasive method
The application of low-level current to the inner ear, via electrodes placed on the head
The anode placed on one mastoid and the cathode on the other side[11]
[11]: Dlugaiczyk, J., Gensberger, K. D., & Straka, H. (2019). Galvanic vestibular stimulation: From basic concepts to clinical applications. Journal of Neurophysiology.
Application

Fabrication
Air Chamber
List
0.2mm PVC
PVC Glue
Adjustable Temperature Iron
Reflection for Better
Opt for more durable materials like TPU nylon.
Utilize an industrial heat sealer for closures and layers.
Increase the number of air chambers to 8 for better force distribution.

For prototyping, we used more accessible and tractable materials like PVC, but for the actual Mars environment, a more precise scientific study should be conducted to determine the optimal materials.
Pneumatic Actuator

State of the System
Test 1
I initially tested with a standard 5V air pump, a 5V solenoid valve, and a PWM switch, using my palm in place of the foot and a balloon as a substitute for a pneumatic actuator.

Problem
When the balloon needs to be activated, it cannot inflate immediately.
When the balloon should be inactive, its deflation process is slow as well.
Reflection
The inflation efficiency of the 5V air pump is too low in simulated scenarios, while the activated state during actual walking is a much shorter duration. Therefore, the 5V air pump does not serve well and should be replaced with an air pump with a higher flow rate (L/min) to better cope with real-world situations.
Updated Parts List
(1) Analog Inputs
Force-sensitive resistor sensors (Interlink 406)
Voltage conversion module
(2) Logic Controller
Arduino Uno
(3) Digital Outputs
12V air pump
MOSFET (IRF520 MOSFET Driver Module)
Three-way, two-channeled solenoid valves (DC 12V)
(4) Others
Connecting wires
air tubes
Circuits

Test2

Programming
I've developed a control system for the air pump: it inflates when the pressure-sensitive sensors at the front and back reach the set thresholds, and it automatically deflates if the conditions aren't met. The algorithm incorporates pressure readings from both sensors to assess and adjust the threshold levels.

Products
Futuristic
Minimalist
Streamlined
Ergonomics
modularized
Comfortable
Metallic
High-tech
Transparent
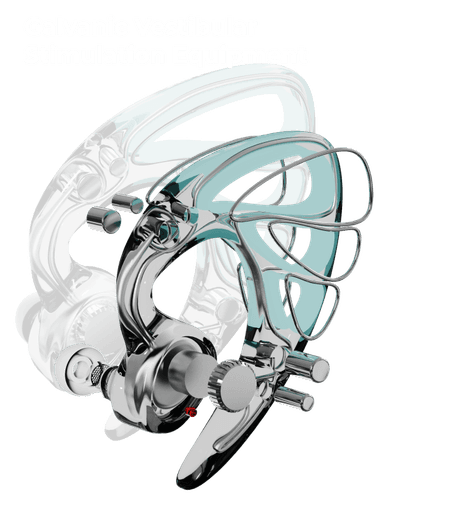
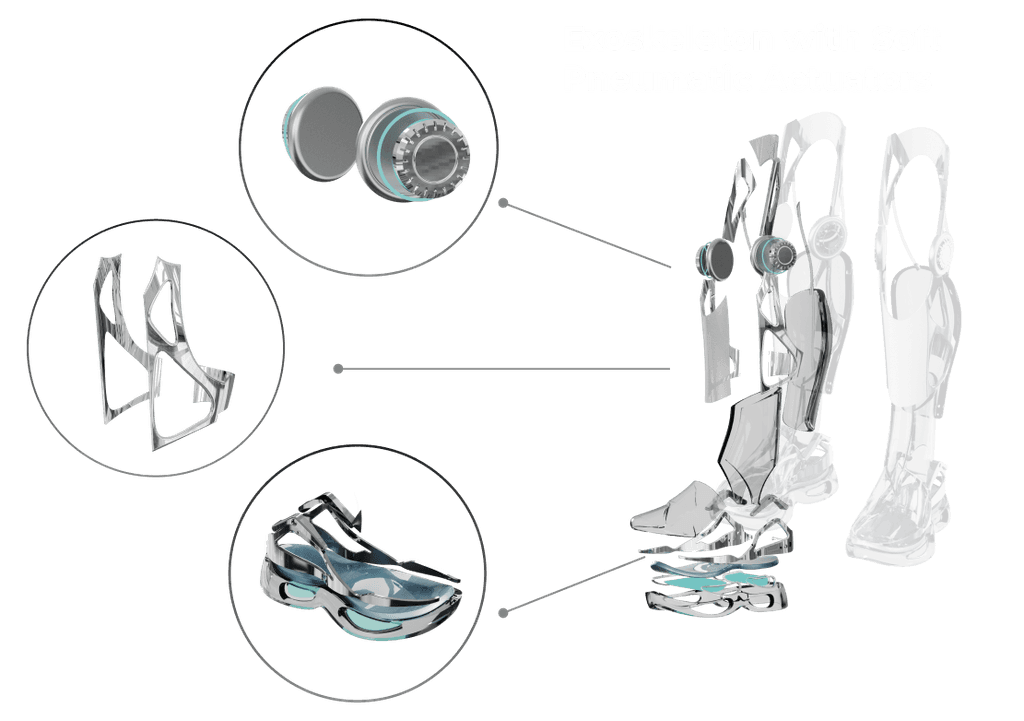
This product features a hybrid design that combines hard elements, an exoskeleton, with soft pneumatic actuators to enhance mobility and adaptability. It also includes an ear-mounted device designed to compensate for vestibular system signals, improving balance and spatial awareness.
Key features include a rotatable knee joint for easy adjustment and wearability, a futuristic and minimalist aesthetic style, and integrated zones at the ankle and calf that seamlessly blend airbags with rigid structures.
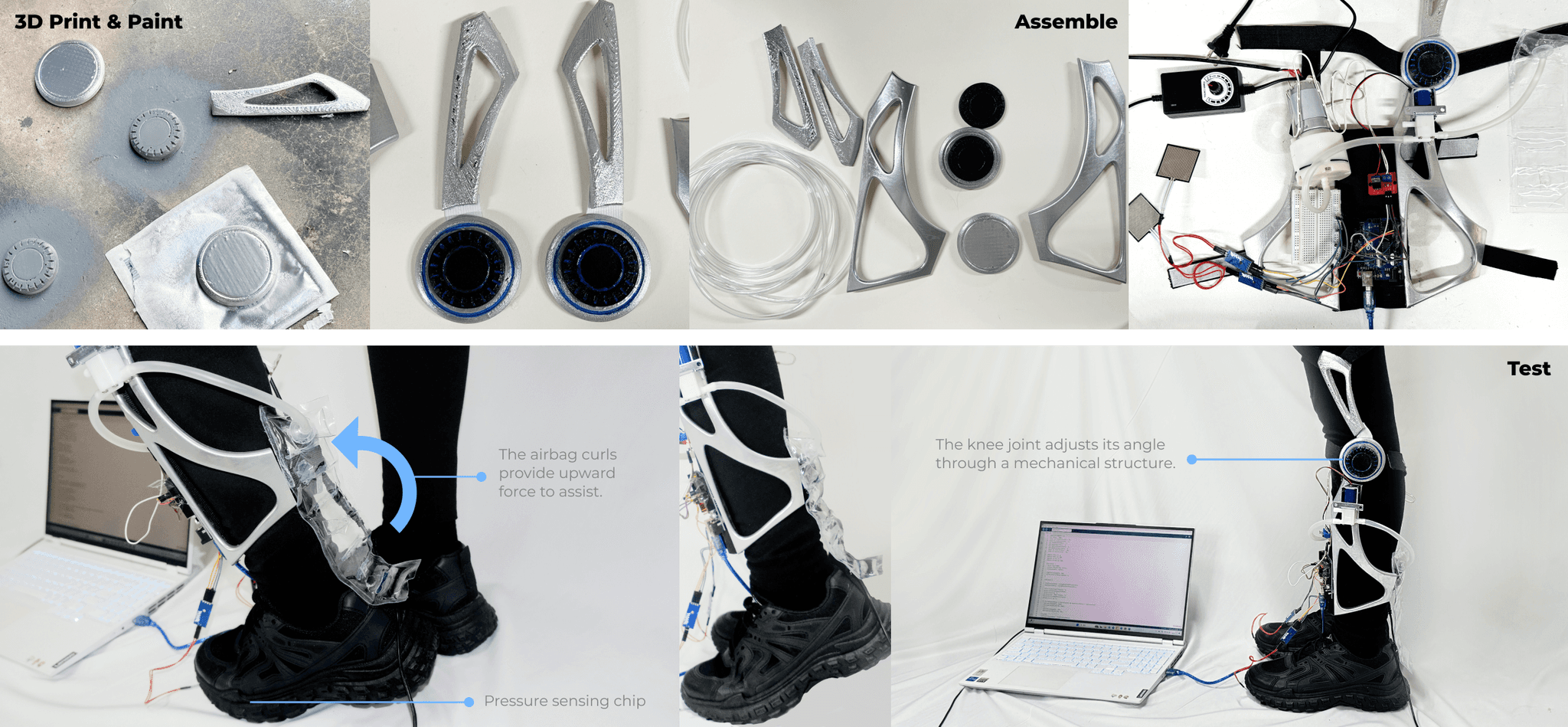
3D Print and Testing
We conducted user testing on the calf section and identified areas for improvement:
1) The size needs better alignment with user data, as the current smallest size is too small for our 160cm-tall model, affecting the airbag's effectiveness.
2) The airbag material should be thicker; the prototype's PVC is too thin and risks tearing after repeated use.
Takeaways
Interdisciplinary Solutions: The Key to Success
In this project, I delved into engineering concepts like pneumatic actuators, which enabled me to design our final product. Collaborating with an industrial design peer on the exterior allowed us to progress to a tangible prototype, making our idea into reality.
Pneumatic Actuators: Fun and Functional Assistance
I explored the fascinating mechanics of pneumatic artificial muscles. Their operation through inflation and deflation provided a practical and powerful solution for our project. It also taught me a lot about assistive devices for walking rehabilitation.
Human-Centric Design: Integrating Human Factors
Incorporating ergonomics into our design process resulted in a more user-friendly product. By prioritizing comfort and reducing strain, we enhanced the user experience, demonstrating the value of human factors in industrial design.
More Projects



Illuminate lives with creativity,
Connect the world with empathy.
Want a Chat?
Copyright ©️ 2024 Yiling Yang . All Rights Reserved

Yiling Yang